OpenCVを使ったPythonでの画像処理について、ここではグリッド検出(Grid Detection)について扱っていきます。
カメラで撮影した時に歪みが生じることがありますが、これをキャリブレーションすることで補正することができます。
ここでは、チェスボードとサークルグリッドと呼ばれるキャリブレーション器具を使って、補正のための基準となるグリッドのマーカー検出を行ってみます。
チェスボードのマーカー検出
まずチェスボードのマーカー検出を行って行きます。
jupyter notebookを使ってライブラリのインポートを行います。
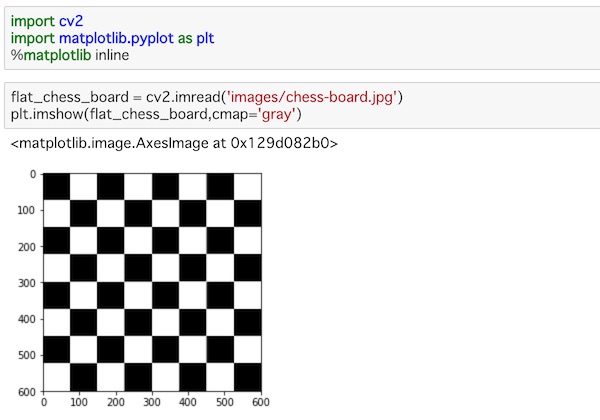
import cv2
import matplotlib.pyplot as plt
%matplotlib inline画像を読み込みます。imagesフォルダにchess-board.jpgというファイルを用意しました。
flat_chess_board = cv2.imread('images/chess-board.jpg')
plt.imshow(flat_chess_board,cmap='gray')
imread()で画像を読み込んでimshow()で表示します。
次のようになります。
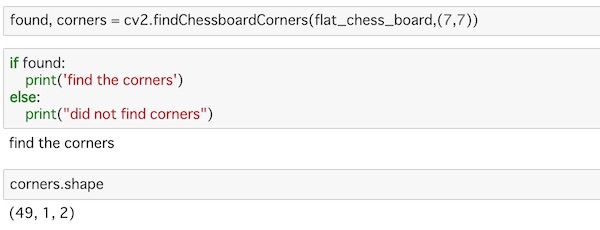
このチェス盤の交差しているコーナー部分をfindChessboardCorners()を使って捉えていきます。
found, corners = cv2.findChessboardCorners(flat_chess_board,(7,7))
findChessboardCorners()に画像を与え、コーナーの数(形状)を与えています。これでコーナー検出の成否とコーナーのデータを取り出せます。
次のコードでコーナー検出の成否を判定できます。
if found:
print('find the corners')
else:
print("did not find corners")コーナーの次元の形状をshapeで見ておきます。
corners.shapeここまでを実行してみましょう。
これらを使って、画像にコーナーを表示する操作をしていきましょう。
flat_chess_copy = flat_chess_board.copy()
cv2.drawChessboardCorners(flat_chess_copy, (7, 7), corners, found)チェス盤の画像をcopy()で複製して作業します。
drawChessboaedCorners()に画像を与え、コーナーの数の形状を与え、先ほど検出したコーナーの数、コーナー検出の成否を与えます。
数値の表示はスペースが長くなるので途中省略しました。
plt.imshow(flat_chess_copy)最後に、画像を表示してみます。
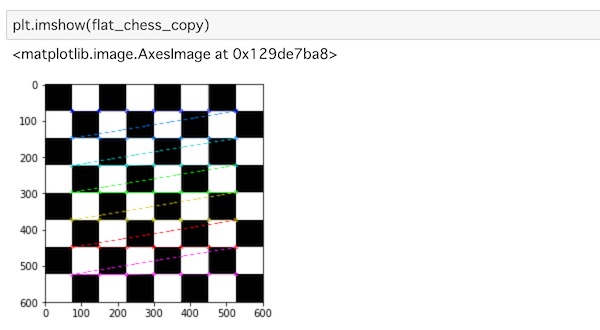
検出された個々ののコーナーをチェス盤に描画しています。チェス盤が不完全に検出された場合は、検出されたコーナーが赤い丸で描画され、完全に検出された場合は、色付きのコーナーが線で結ばれて描画されます。
サークルグリッドのマーカー検出
続いてサークルグリッドのマーカー検出を行って行きます。
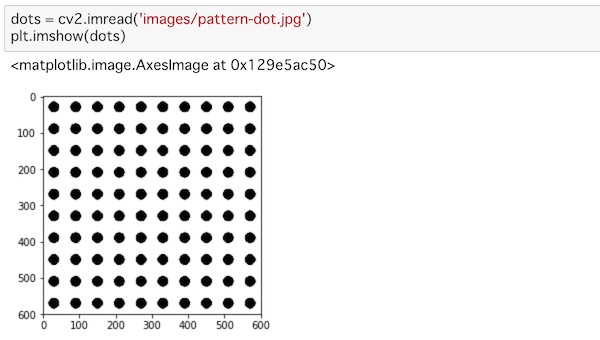
dots = cv2.imread('images/pattern-dot.jpg')
plt.imshow(dots)ドットのパターンの画像を用意してこれまでと同様に読み込んでいます。
こちらを今度はfindCirclesGrid()で処理していきます。
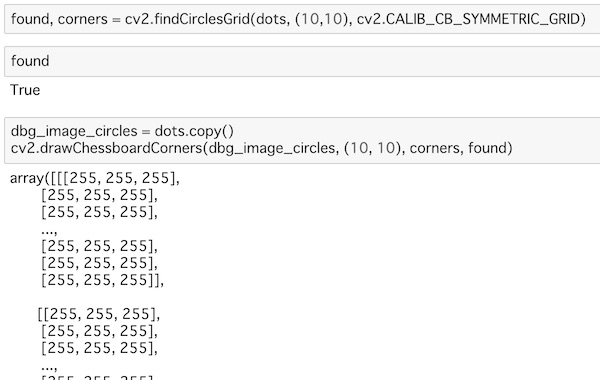
found, corners = cv2.findCirclesGrid(dots, (10,10), cv2.CALIB_CB_SYMMETRIC_GRID)
findCirclesGrid()に画像を渡し、コーナーの数の形状と処理のフラグのCALIB_CB_SYMMETRIC_GRIDを渡しています。CALIB_CB_SYMMETRIC_GRIDは円形の対称パターンで利用します。他にCALIB_CB_ASYMMETRIC_GRIDがあり、これは円形非対称パターンで利用します。
foundは先ほどと同じように検出の成否を調べています。
dbg_image_circles = dots.copy()
cv2.drawChessboardCorners(dbg_image_circles, (10, 10), corners, found)画像をcopy()で複製して処理していきます。
drawChessboardCorners()を使って、チェスボードのマーカー検出と同じように描画の処理を行います。
こちらも数値の表示は途中省略しました。
plt.imshow(dbg_image_circles)最後に画像を表示します。
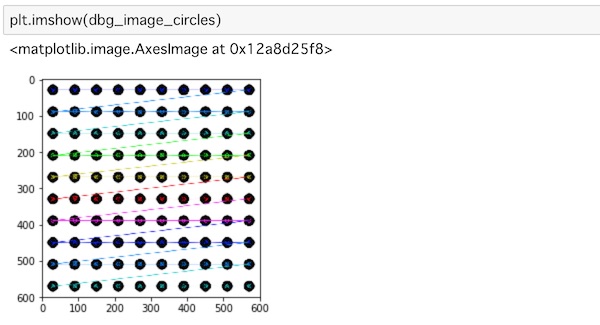
ドットが検出されているのがわかります。
最後に
ここでは、OpenCVを使ったPythonでの画像処理について、チェスボードとサークルグリッドと呼ばれるキャリブレーション器具を使って、補正のための基準となるグリッドのマーカー検出を扱ってみました。
カメラで撮影した時に歪みが生じることがありますが、この処理を元にキャリブレーションすることで画像の歪みの補正に繋げることができます。

